原理圖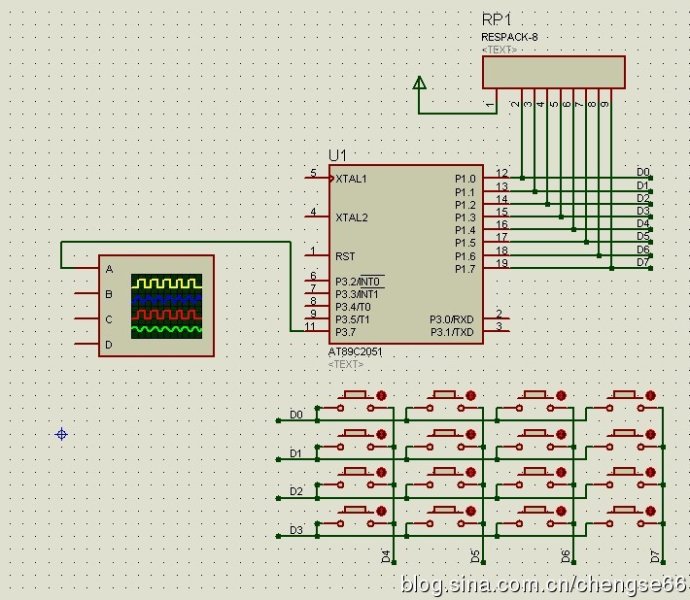
本文引用地址:
http://cafeforensic.com/article/201611/321335.htm
#include "REG2051.H"
#include "intrins.h"
#define uint unsigned int
#define uchar unsigned char
const TH_600=0xfd;
const TL_600=0xd4;
const TH_1200=0xfb;
const TL_1200=0x7c;
const TH_2400=0xf6;
const TL_2400=0xa0;
sbit PWM=P3^7;
bit ld=0; //上一次發(fā)送的數(shù)據(jù)
uchar _pool[10]; //數(shù)據(jù)頭
uchar _length; //當前數(shù)組長度
uchar _index; //當前索引
uchar _bit_index; //位索引
void onKeyDown(uchar,uchar);
void push(uchar);
void init();
void main(){
unsigned int r,c,prsd;
init();
while(1){
P1=0x0f;
if(P1!=0x0f){
r=~P1-0xf0;
P1=0xf0;
c=~(P1>>4)-0xf0;
if(!prsd){
onKeyDown(r,c);
prsd=1;
}
}else{
prsd=0;
}
}
}
void init(){
_length=0;
PWM=0;//啟動時低電平
TMOD=0x01;
TH0=0x9E;
TL0=0x57;
ET0=1;
TF0=1;
TR0=1; //打開計時器
}
void push(uchar xcode){
_pool[_length]=xcode;
_length++;
}
void reset(){
_index=0;
_length=0;
_bit_index=0;
}
void onKeyDown(uchar row,uchar column){
unsigned char xcode;
reset();
push(0xaa); //壓入地址碼
xcode=row<<4+column;
push(xcode); //壓入鍵盤數(shù)據(jù)
EA=1;
while(EA);
}
void timer_pwm() interrupt 1{
uchar current,tmp;
if(PWM){
PWM=~PWM;
TH0=TH_600;
TL0=TL_600;
}else{
if(_index==_length){
EA=0;
}else{
PWM=~PWM;
_bit_index++;
current=_pool[_index];
tmp=current<<_bit_index;
ld=CY;
if(ld){
TH0=TH_1200;
TL0=TL_1200;
}else{
TH0=TH_600;
TL0=TL_600;
}
}
if(_bit_index==8){
_bit_index=0;
_index++;
}
}
}
技術專區(qū)


評論